Projects
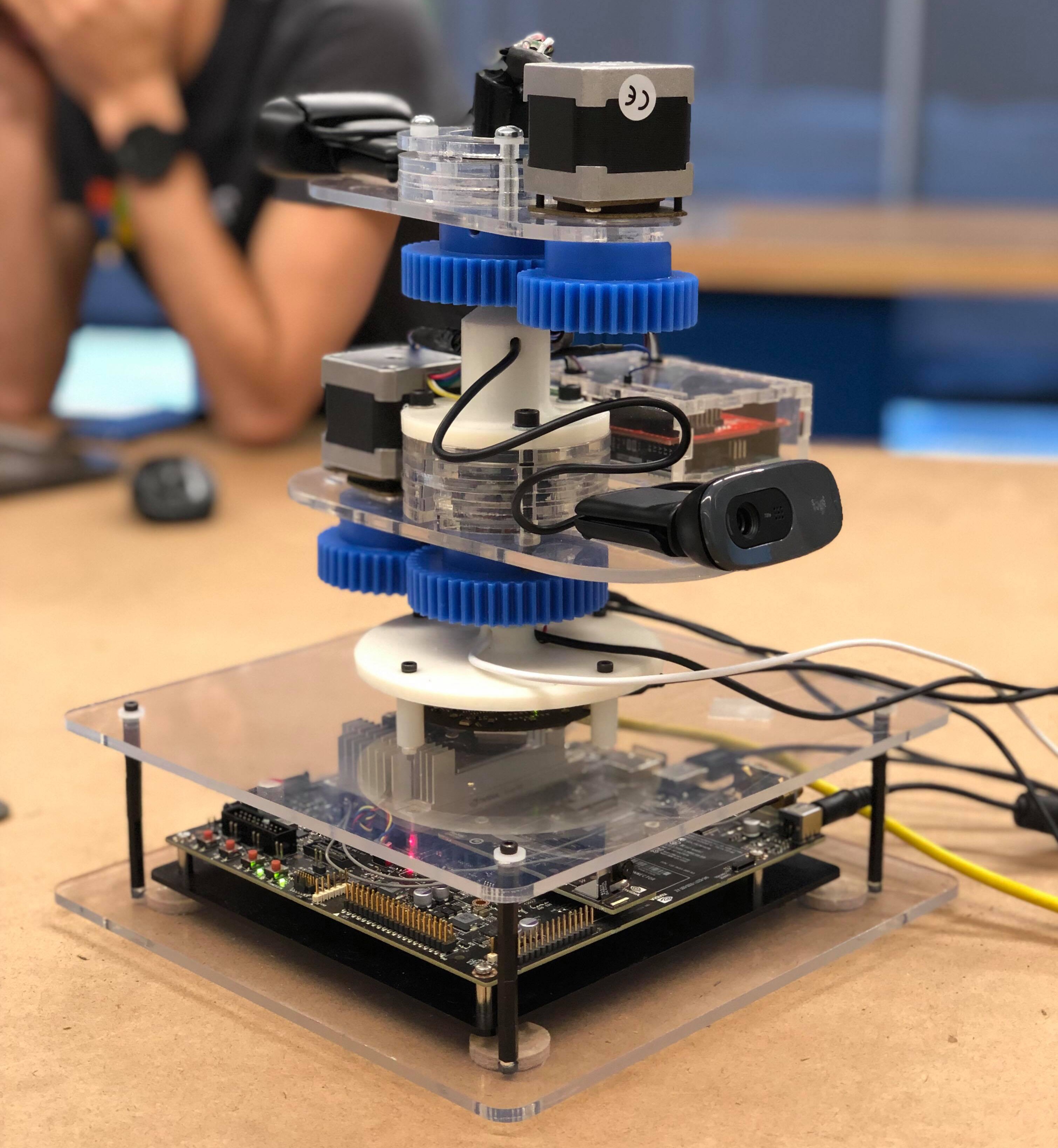
Capstone Design Project: Moment
Moment is an automated conference calling system.
It has two cameras which can rotate a continuous 360 degrees independipendently.
Using a microphone array and computer vision AI it can detect 'iteresting' people
(ie. people talking or people doing something interesting).
The system then moves the nearest camera to that person
and streams from that camera.
I developed the mechanical design, wrote the AI/Computer vision, wrote mapping software and wired the system.
Project Blog: AI post, Mapping post

Autonomous Underwater Vehicle
This autonomus underwater vehicle was built to navigate an underwater obstacle course. This involved designing a mechanical system, integrating sensors and a camera and waterproofing everything. Additionally, computer vision and path planning algorithms were used to navigate the course.
Project Presentation
Carabiner Stress Analysis
For a course project,
we optimized the design of a carbiner to minimize the weight while maintaining the tensile stregth capabilities.
We used SolidWorks to create the carabiner, which was based on a Neutrino carabiner
and then used ANSYS AIM to determine the tensile strength.
We were awarderd $1000 for best overal project.

How Fast Can You Run With Perfect Race Splits?
Created a formula that tells you how fast you could have run a race if you ran perfectly even splits.
Website